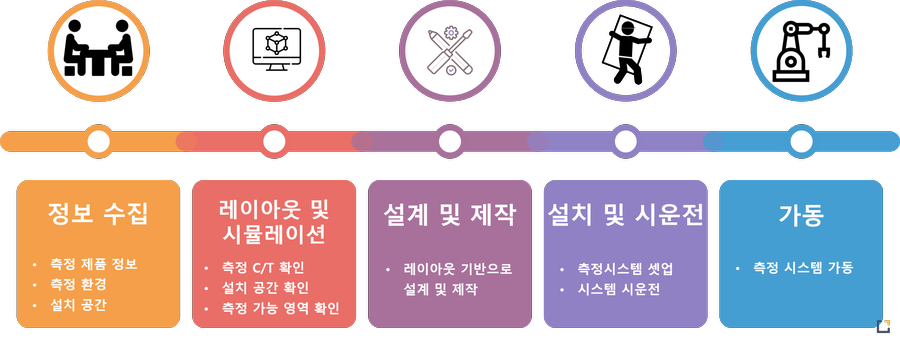
3차원 스캐너를 활용한 자동화 측정 시스템 도입은 다음과 같은 주요 단계로 진행됩니다. OLP(Off-Line Programming) 소프트웨어를 활용한 시뮬레이션 및 레이아웃 검증을 통해 최적화된 자동화 측정 시스템을 구축합니다.
[1. 정보 수집]
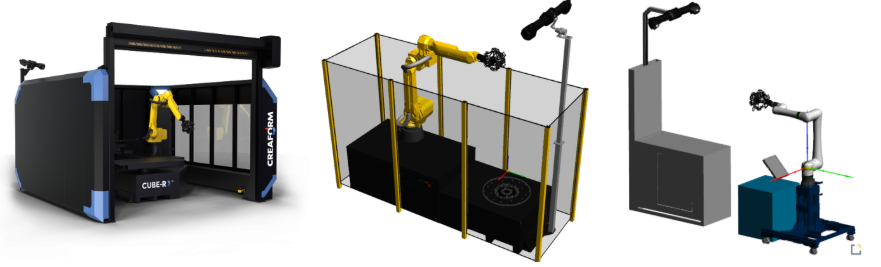
시스템 도입의 첫 단계로, 측정 대상 및 설치 환경에 대한 정확한 정보를 수집하고, 수집된 정보를 기반으로 적합한 스캐너, 로봇 등을 선정하여 레이아웃을 생성합니다.
● 측정 제품 정보 – 측정할 제품의 크기, 형상, 재질, 관리 공차 등
● 측정 환경 – 온도, 습도, 조명 상태 등
● 설치 공간 – 시스템 설치 공간의 크기 및 제약 조건 등
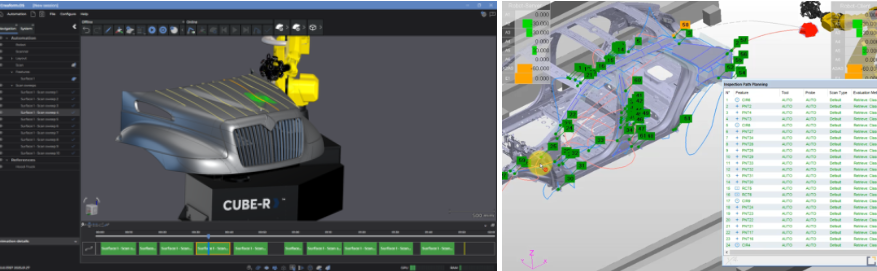
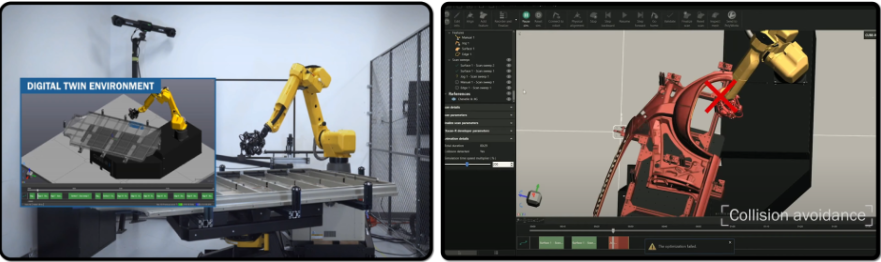
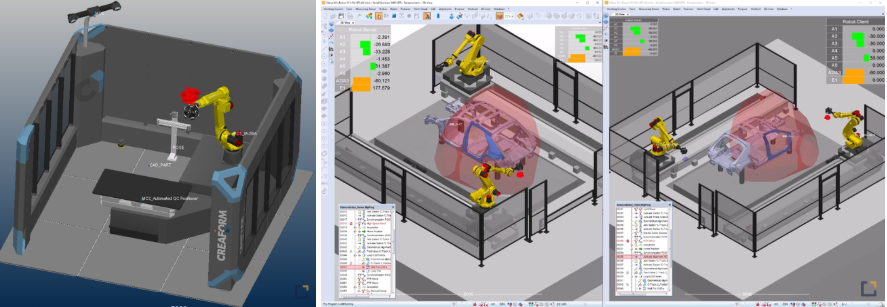
[2. 레이아웃 및 시뮬레이션]
수집된 정보를 기반으로 측정 제품이 측정 영역을 벗어나지는 않는지, 로봇과 스캐너 시스템은 몇 대 정도 필요하고 추가 부가축이 필요한지, 로봇과 스캐너 시스템의 위치는 적절한지 등을 확인하면서 환경에 맞는 레이아웃을 생성합니다.
● 측정 C/T 확인 – 측정 사이클 타임 검토
● 설치 공간 확인 – 로봇 및 스캐너의 위치와 설치 가능 여부 검토
● 측정 가능 영역 확인 – 측정 대상이 스캐너 범위를 벗어나지 않는지 확인
[3. 설계 및 제작]
시뮬레이션을 거쳐 측정 시간 및 측정 포인트 획득에 대한 문제가 없다고 판단되면, 최종 레이아웃을 확정하여 시스템에 대한 설계 및 제작을 시작합니다. 만약 타공정과의 연계가 필요한 경우, 통신 방법과 결과물 출력 방식 등을 최종 협의하여 진행해야 합니다.
● 레이아웃 기반 설계 진행 – 시뮬레이션 결과 반영
● 제작 착수 – 확정된 설계에 따라 시스템 제작 진행
[4. 설치 및 시운전]
제작이 완료되면 시스템 설치 및 시운전을 진행합니다.
● 측정 시스템 셋업 – 장비 설치 및 정밀 조정
● 시스템 시운전 수행 – 측정 시간, 정확도, 공정 연계 상태 점검 및 수정
[5. 가동]
시운전 과정에서 발생하는 문제점을 보완하여 자동화 측정 시운전이 성공적으로 완료되면 시스템을 정식 가동합니다.
● 측정 시스템 가동 – 측정 프로세스 자동화 시작
|