test 3차원 스캐너 기반 자동화 측정 시스템의 모든 것
- 구축 프로세스와 체크리스트 - |
|
|
|
레이아웃 구성에는 앞서 설명드린 두 소프트웨어가 사용됩니다. |
| |
|
|
| 먼저, Automation은 화낙(FANUC), 쿠카(KUKA), 유니버설 로봇과 호환됩니다.
특히 화낙 로봇과의 호환성이 가장 우수하며, 산업용 로봇뿐 아니라 협동 로봇 모델도 지원 가능합니다. 현재 지원 가능한 로봇 모델이 제한적이지만, 지속적으로 사용 가능한 로봇 모델이 확대되고 있어 향후 더 다양한 모델의 호환이 기대됩니다. |
|
|
|
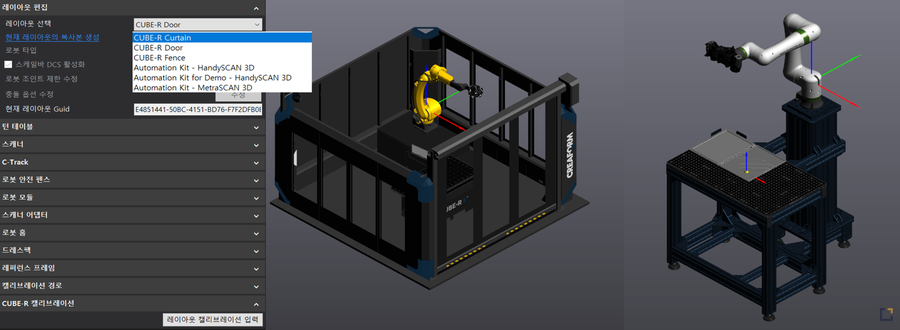
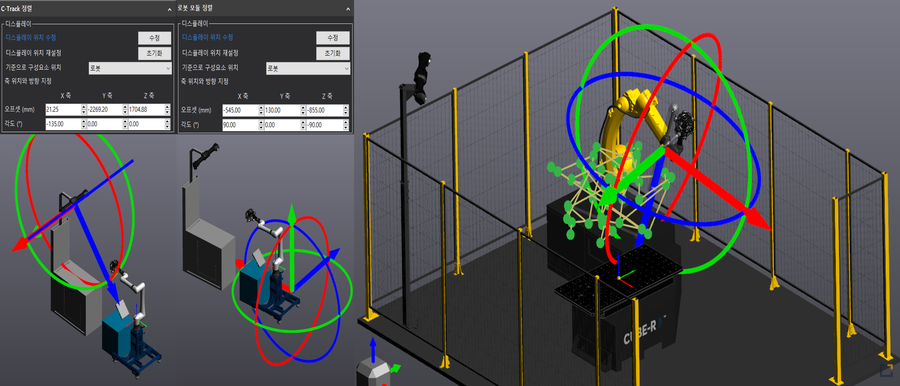
| 또한 크레아폼의 턴키 솔루션 자동화 시스템인 CUBE-R 및 Automation Kit의 레이아웃을 기본으로 제공하며, 기본 제공 레이아웃에서 로봇 및 트래커, 턴테이블의 위치 수정이 가능합니다.
별도의 추가 작업 없이 레이아웃 구성이 가능하며, 사용자의 작업 환경에 맞춰 CAD 데이터를 불러와 맞춤형 레이아웃을 구성할 수 있습니다. 이렇게 작성된 레이아웃에 맞는 스캐너 및 트래커의 캘리브레이션을 위한 로봇 경로가 자동으로 생성됩니다.
|
|
|
|
| Metrolog X4는 측정 환경 및 제품 특성에 따라 다양한 컨셉의 레이아웃 구성이 가능합니다. 라이브러리를 통해 다양한 레이아웃 구성을 제공하며, CAD 데이터를 활용해 필요 요소를 불러올 수 있습니다. |
|
|
|
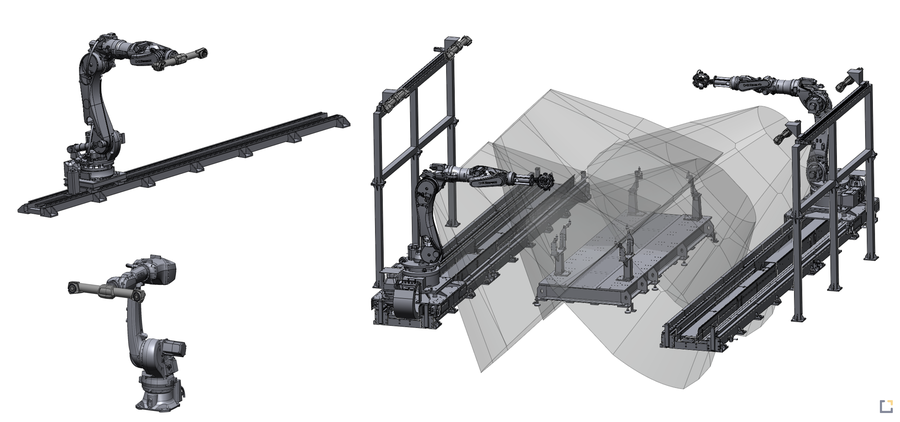
| 위와 같이 로봇이 부가축을 따라 움직이거나 트래커를 로봇에 장착해 측정할 수 있습니다. 또한 측정 시간이 중요한 경우 여러 대의 스캔 시스템을 동시에 활용해 측정 시간을 단축할 수 있습니다. |
|
|
|
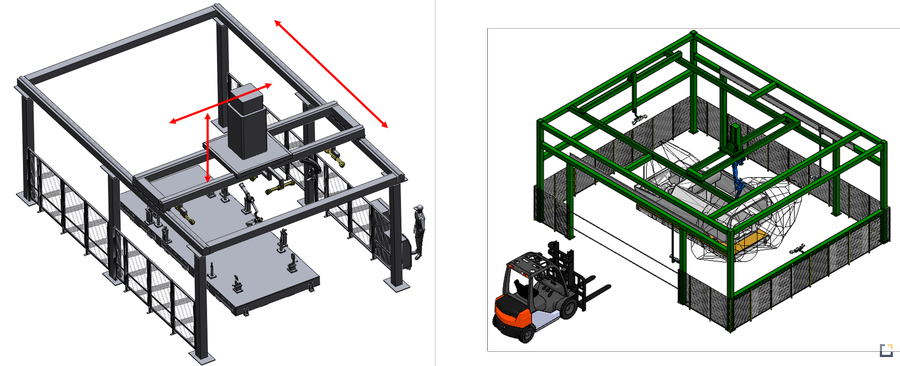
| 제품의 크기가 큰 경우 턴테이블이나 여러 개의 부가축을 사용해 트래커가 움직이도록 하며, 로봇 역시 부가축을 통해 이동하면서 측정이 가능합니다. 이러한 방식으로 레이아웃과 시뮬레이션을 생성하고, 이를 기반으로 로봇 프로그래밍이 가능합니다.
|
|
|
|
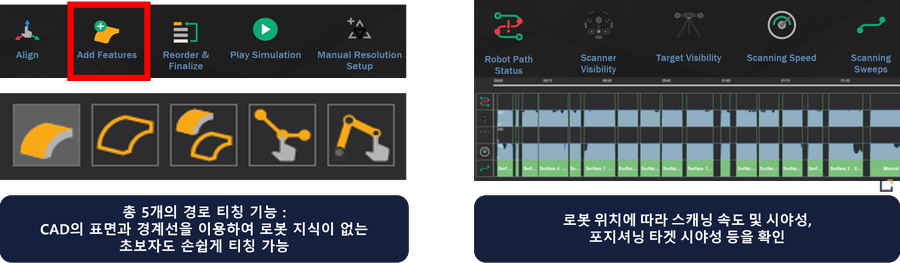
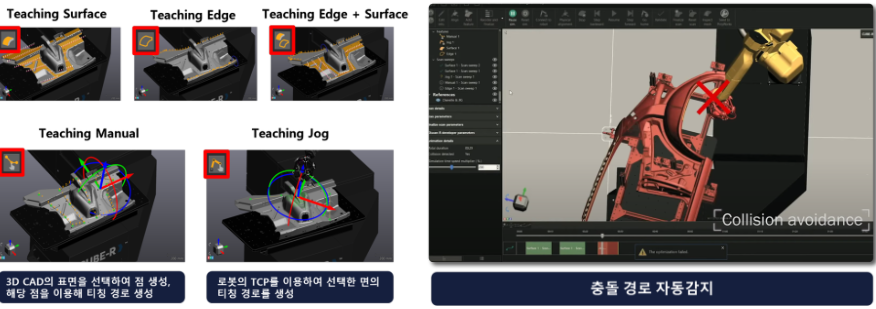
| 앞서 말했듯이 Automation은 CAD 데이터를 기반으로 로봇의 스캔 경로를 손쉽게 생성할 수 있습니다.
로봇의 위치나 제품의 위치에 따라 스캐너 및 포지셔닝 타겟의 시야성이 확보되지 않는 부분을 자동으로 계산해 로봇의 스캔 경로를 최적화합니다. 이를 통해 로봇 조작에 익숙하지 않은 초보자도 쉽게 경로를 생성할 수 있습니다. 또한 생성된 경로의 순서나 충돌 가능성을 자동으로 검토해 최적의 이동 경로를 설정합니다. |
|
|
|
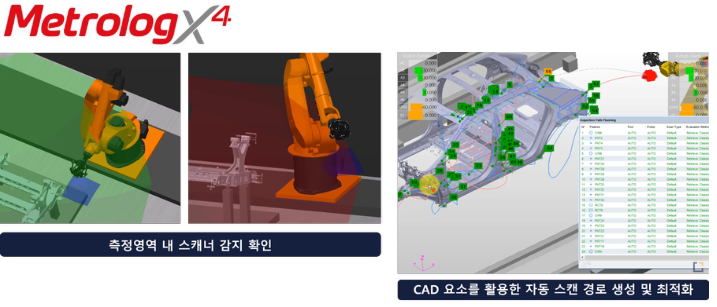
| Metrolog X4 역시 CAD 데이터를 활용해 스캔 경로를 생성하며, 충돌 방지 및 경로 최적화 기능을 제공합니다. 특히 트래커의 측정 영역 내에서 스캐너 감지 여부에 대한 확인이 가능합니다. |
|
|
|
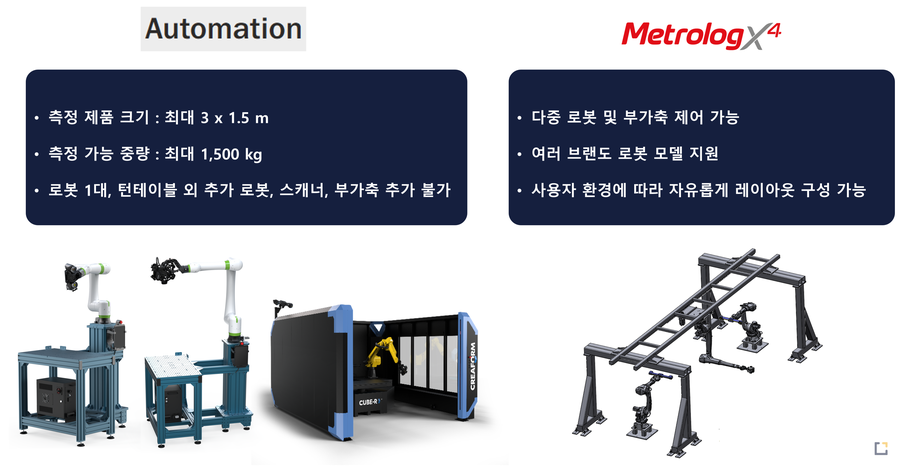
| 결론적으로 측정 제품의 크기, 중량, 설치 공간 등에 따라 스캐너 시스템 및 OLP 소프트웨어 선택이 달라집니다.
측정 대상이 최대 크기 3m x 1.5m, 중량 1500kg 이내이고, 턴테이블 및 1세트의 스캔 시스템을 사용하는 경우에는 Automation이 적합합니다. 반면, 이외 크기나 스캔 시스템이 2세트 이상, 로봇이 2대 이상 필요한 경우, 또는 추가 부가축이 요구되는 경우에는 Metrolog를 활용할 수 있습니다. 이처럼 다양한 작업 환경과 요구 사항에 맞춰 최적의 시뮬레이션 및 시스템 구성이 가능합니다. |
|
|
|
| 설계 및 제작 단계에서는 레이아웃 및 시뮬레이션을 통해 검증된 시스템 사양을 바탕으로 기구물 및 시스템 설계를 진행합니다.
측정 포인트 및 측정 시간 등의 요구사항이 협의를 통해 확정되고, 시뮬레이션 결과에서 측정 가능 여부 및 설치 공간 내 동작 상태가 문제가 없다고 판단될 경우 본격적인 설계 작업이 시작됩니다.
크레아폼의 자동화 키트(Automation Kit) 및 큐브알(CUBE-R) 시스템의 경우 턴키 솔루션으로 별도의 추가 설계가 필요하지 않지만, 제품 특성이나 환경에 따라 로봇의 위치, 트래커의 위치, 테이블 크기 등을 조정해야 할 경우에는 맞춤형 설계가 필요합니다. 또한 In-Line의 경우에는 다른 공정과의 연계를 위해 통신 방법이나 측정 결과 출력 방식 등을 협의하고, 별도 소프트웨어가 필요할 경우 개발이 병행됩니다.
|
|
|
|
| 설치 및 시운전 단계에서는 제작이 완료된 기구물을 설치한 후 로봇과 스캐너를 셋업하고, 시스템 간 연결 상태를 점검한 뒤 시운전 및 테스트를 진행합니다.
로봇의 동작 상태, 스캐너의 정확도, 안전 장치의 작동 상태 및 기타 시스템의 동작 상태를 종합적으로 점검합니다. 테스트 과정에서 문제가 발견될 경우 즉각적인 보완 및 수정 절차를 수행하며, 모든 시스템의 동작 상태가 정상적으로 확인되면 자동화 측정 시스템의 본격적인 가동 준비를 진행합니다. |
|
|
|
| 마지막으로 가동 단계에서는 실제 측정이 진행될 파트를 셋업하고 로봇의 측정 경로를 생성합니다.
시뮬레이션을 통해 로봇 경로와 충돌 가능성을 최종 점검한 후, 측정 검사 프로그램에서 검사할 측정 포인트에 대한 검사 프로젝트를 생성하고 측정 결과 레포트를 작성합니다. 초기 설정 과정에서 처음 1회에 한해 스캔 측정 시스템을 동작시켜 충돌 가능성을 다시 한번 확인합니다.
스캔이 완료된 후 측정 결과를 확인하면서 스캔 데이터가 정상적으로 획득되었는지, 측정 결과에 이상이 없는지를 검토합니다. 모든 시스템이 정상적으로 작동하고 요구 사양이 충족되었다고 판단되면 자동화 측정 시스템의 본격적인 가동을 시작합니다.
-
자동화 시스템 도입에는 상당한 비용이 소요되기 때문에, 가상 공간에서 문제점을 사전에 식별하고 시뮬레이션을 통해 측정 가능 여부를 검증하는 과정은 필수적입니다. 이를 통해 시스템 설치 후 발생할 수 있는 위험 요소를 최소화하고, 보다 안정적이고 정확한 측정 시스템을 구축할 수 있습니다.
|
|
|
|
|